
Encuentra más información en nuestro repositorio digital
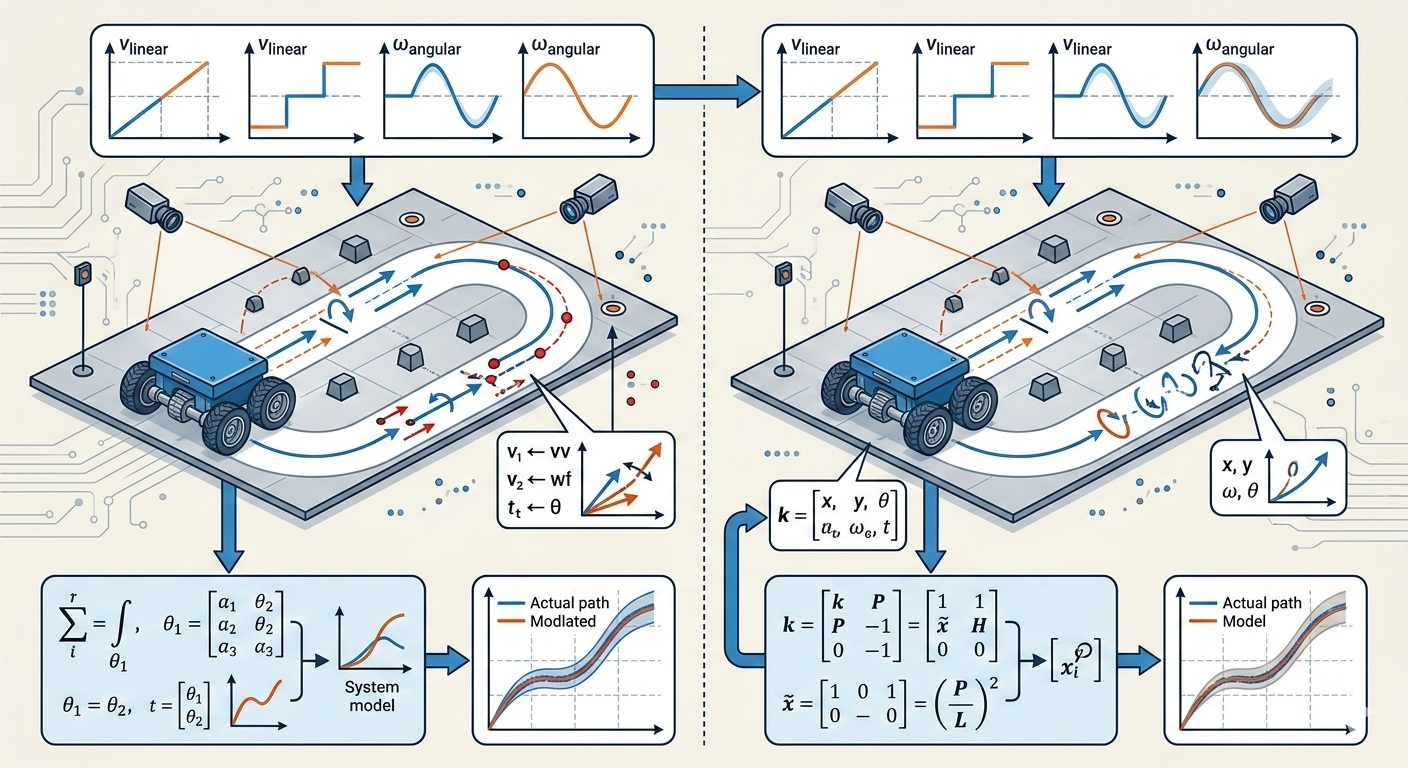
El modelado preciso de los robots de accionamiento diferencial es crucial para un control eficaz y la planificación de trayectorias en sistemas autónomos. En este artículo se presenta un análisis comparativo de dos enfoques de modelado para un robot diferencial con tracción a las cuatro ruedas. El primer método, denominado modelo basado en motores (MBM), identifica cuatro funciones de transferencia, una para cada motor, mientras que el segundo método, denominado modelo simplificado (SM), utiliza sólo dos funciones de transferencia, una para la velocidad lineal y otra para la velocidad angular.
Ambos modelos se validaron comparando sus trayectorias previstas con los datos reales de odometría obtenidos de un sistema SLAM implementado en un robot de accionamiento diferencial. Esto proporcionó una evaluación práctica de la precisión de cada modelo y subrayó la importancia de la selección del modelo en las tareas de diseño de control y navegación. Los resultados mostraron que el modelo basado en motores (MBM) superó consistentemente al modelo simplificado (SM) en términos de precisión odométrica, tanto en posición como en orientación. En todas las trayectorias, el RMSE medio para la posición utilizando MBM fue de 0,309 m, mientras que el SM registró un RMSE medio más alto de 0,414 m. Del mismo modo, el error máximo de posición promedió 0,522 m para MBM y 0,710 m para SM, confirmando que el MBM es más preciso y consistente en el seguimiento de posición.
En cuanto a los resultados de la estimación de orientación, cuando se promedia entre todos los experimentos, el MBM mantuvo una RMSE angular más baja de 0,170 rad en contraste con SM, que logra una RMSE de 0,239 rad. El error angular máximo también fue mayor para la MBM a 0,316 rad, comparado con 0,447 rad para la SM. Además, la evaluación del rendimiento computacional indicó que el SM superó consistentemente al MBM, logrando una reducción del 30% en el tiempo de simulación y un uso de memoria sustancialmente menor.
Estos resultados demuestran la relación entre la complejidad del modelo y la precisión y sugieren que el modelo específico del motor es más apropiado para las aplicaciones que requieren una cartografía o localización precisa, como SLAM, mientras que el modelo simplificado puede ser adecuado para casos de uso más simples con requisitos computacionales menores, tales como sistemas integrados con recursos limitados. Este artículo proporciona una evaluación práctica de la precisión y el rendimiento computacional de dos enfoques de modelado, destacando las implicaciones de la selección de modelos para el diseño de tareas de navegación.