
Encuentra más información en nuestro repositorio digital
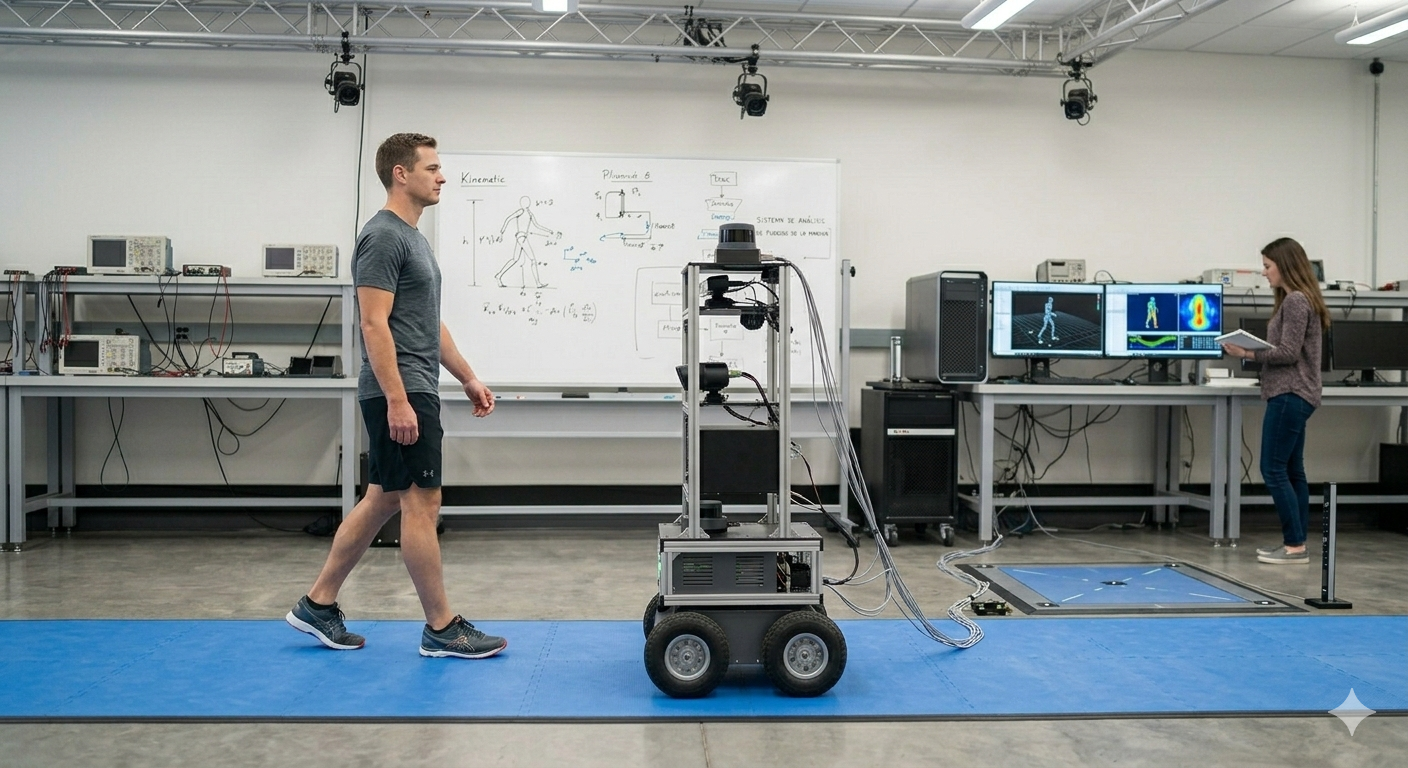
La integración de tecnologías robóticas en el ámbito de la salud continúa generando soluciones innovadoras para el estudio del movimiento humano. En este contexto, una investigación reciente presenta el desarrollo y validación de una plataforma robótica móvil basada en Robot Operating System (ROS), diseñada para el análisis de la marcha humana en entornos reales.
El sistema combina un diseño mecánico y de control avanzado, que incluye la implementación de un compensador de plomo y un predictor de Smith filtrado, permitiendo un seguimiento preciso y estable de los usuarios durante el desplazamiento. Esta arquitectura facilita la captura de datos cinemáticos relevantes sin necesidad de sistemas invasivos o instalaciones complejas.
Para validar su desempeño, se analizaron 100 registros de marcha obtenidos a partir de 20 participantes, quienes caminaron en trayectorias rectas. Los resultados fueron comparados con un sistema de referencia certificado como Vicon motion capture system, evidenciando una alta correlación y bajos niveles de error, especialmente en el análisis de movimientos articulares en planos sagitales y transversales.
Entre los principales aportes del estudio destaca la capacidad del sistema para realizar análisis de marcha en rangos de seguimiento más amplios y sin las limitaciones espaciales de los laboratorios tradicionales. Además, el diseño de la ley de control permitió un rastreo fluido del usuario, mejorando la calidad de los datos obtenidos.
Este desarrollo se posiciona como una alternativa accesible, no invasiva y eficiente para el análisis biomecánico de la marcha, con potencial de aplicación en diagnóstico clínico, rehabilitación y monitoreo de trastornos del movimiento.
Accede al artículo completo aquí