
Encuentra más información en nuestro repositorio digital
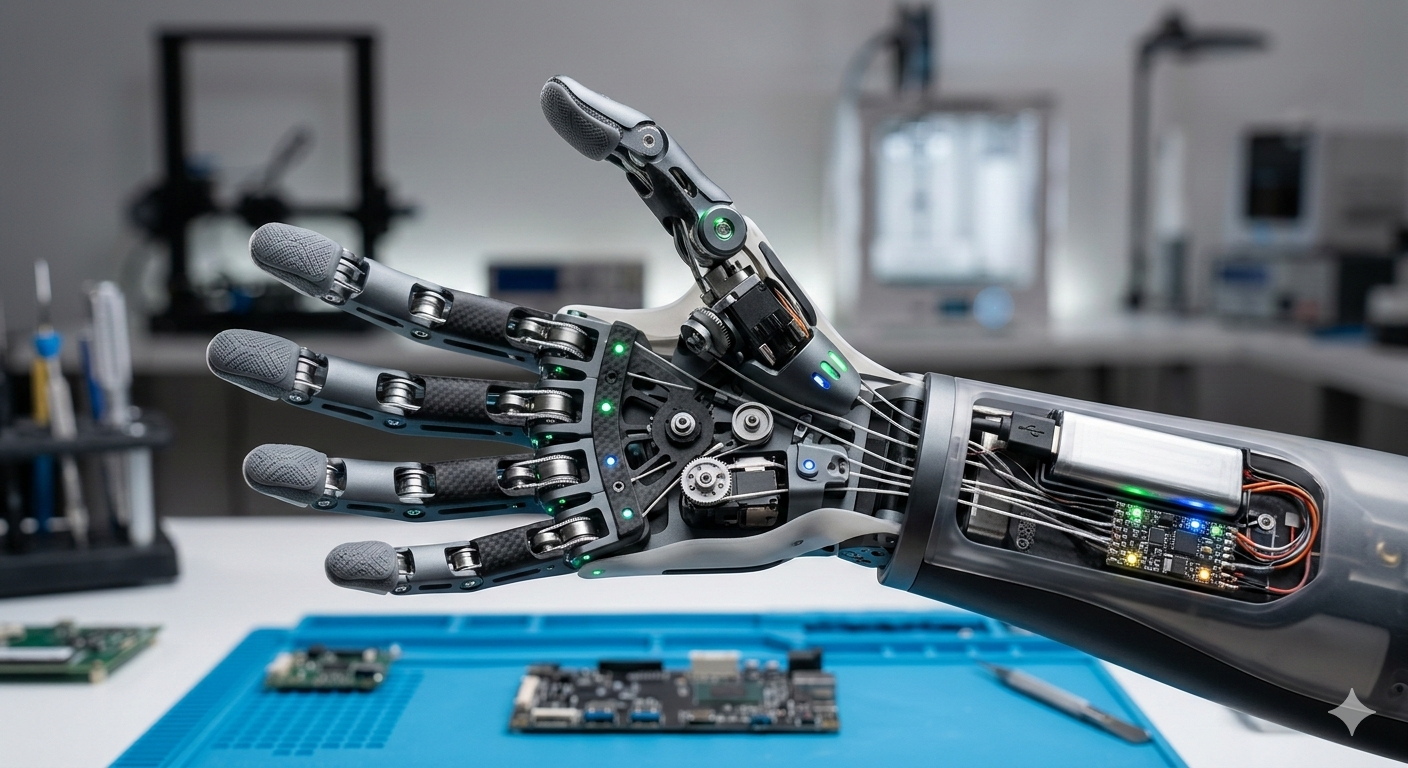
La mano humana es uno de los sistemas más complejos y precisos del cuerpo, lo que representa un desafío significativo para su reproducción en robótica. En respuesta a esta dificultad, un estudio reciente presenta el diseño de ManoPla, una mano robótica ágil, autosostenida y totalmente integrada, concebida para la comunicación gestual en robots humanoides.
El principal reto abordado por la investigación fue la integración de componentes mecánicos y electrónicos en un espacio reducido, sin comprometer la funcionalidad ni la naturalidad del movimiento. Para ello, se desarrolló un enfoque mecatrónico innovador que combina ambos sistemas en una estructura compacta, ligera y eficiente.
Entre sus características más destacadas se encuentra el uso de mecanismos con componentes elásticos que permiten una movilidad articular fluida, así como la implementación de un sistema de retroalimentación basado en el método de gradiente de color para monitorear la posición de las articulaciones. Además, el diseño incorpora un pulgar con cuatro grados de libertad y una estructura tipo trapecio, lo que amplía significativamente la capacidad de manipulación.
El desarrollo de ManoPla también logró reproducir la taxonomía de agarres propuesta por Cutkosky grasp taxonomy, demostrando su versatilidad en la ejecución de distintos tipos de movimientos. Asimismo, pruebas de impacto evidenciaron la flexibilidad y resistencia de sus articulaciones, gracias al uso de actuadores elásticos en serie (SEA).
Este avance representa una contribución significativa en el campo de la robótica, al proponer nuevos conceptos de diseño que facilitan la integración total de sistemas en dispositivos compactos. ManoPla se posiciona como un módulo gestual adaptable para robots humanoides, con aplicaciones potenciales en interacción social, asistencia y comunicación humano-máquina.